As part of an obstacle avoidance system for our drone project, I built this simple test bed for the Garmin LIDAR-Lite v3 imager. The sensor is mounted on a simple slip ring driven by a basic CNC stepper motor. An arduino is used to drive a stepper motor controller and read the distance values from the sensor.
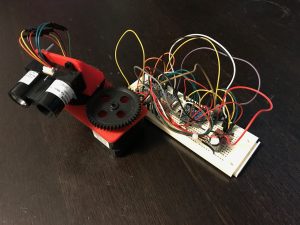
Distance and angle pairs are written to a serial connection at 3.6 degree increments, corresponding to a single step on the stepper motor.
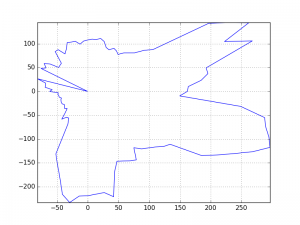
To visualize the data, I wrote a simple Python script which parses the serial data stream and plots the data live in Matplotlib.
All the code and 3D printable files are available on GitHub.